











क्यू आर संहिता

हमारे बारे में
उत्पादों
संपर्क करें

फ़ोन


पता
नंबर 22, हांगयुआन रोड, गुआंगज़ौ, गुआंगडोंग प्रांत, चीन

चूंकि विनिर्माण उद्योग अधिक सटीकता और दक्षता की ओर बढ़ता है, इसलिए उत्पादन प्रक्रिया में स्वचालन और बुद्धिमत्ता के स्तर पर उच्च आवश्यकताओं को रखा गया है। जटिल और अत्यधिक सटीक वर्कपीस जैसे जड़त्वीय रिंग, पारंपरिक लोडिंग विधियों के साथ सामना करना पड़ता है, अपर्याप्त हो गए हैं। इस समय, 3 डी विजन प्रौद्योगिकी के उदय ने इस समस्या के लिए क्रांतिकारी समाधान लाए हैं। यह न केवल खिला की सटीकता में सुधार करता है, बल्कि उत्पादन लाइन के लचीलेपन और दक्षता को भी बढ़ाता है।
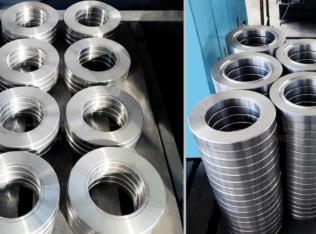
3 डी विजन प्रौद्योगिकी का मूल सिद्धांत कंप्यूटर के माध्यम से वस्तुओं के तीन आयामी स्थानिक जानकारी को संसाधित और विश्लेषण करना है, और ऑब्जेक्ट मान्यता, पता लगाने, ट्रैकिंग और माप जैसे संचालन प्राप्त करना है। जड़त्वीय रिंगों के सटीक खिला के आवेदन में, 3 डी विजन प्रौद्योगिकी जड़ता की अंगूठी की तीन-आयामी स्थानिक जानकारी को कैप्चर करती है, जो रोबोट को सटीक लोभी स्थिति और आसन के साथ प्रदान करती है, इस प्रकार जड़त्वीय अंगूठी के पूर्व-भोजन को प्राप्त करती है।

इमेजिंग एल्गोरिदम के संदर्भ में, 3 डी विजन प्रौद्योगिकी उन्नत एल्गोरिदम को जटिल परिस्थितियों जैसे सतह प्रतिबिंब और तेल फिल्म कवरेज के साथ जड़ता के छल्ले के कवरेज से निपटने के लिए अपनाती है। एल्गोरिदम का अनुकूलन करके, सिस्टम स्पष्ट और सटीक बिंदु क्लाउड डेटा उत्पन्न करने में सक्षम है, जो बाद की मान्यता और कैप्चर के लिए एक ठोस आधार प्रदान करता है।
कैमरा चयन के संदर्भ में, 3 डी विज़न सिस्टम को उच्च रिज़ॉल्यूशन, बड़े क्षेत्र के दृश्य और क्षेत्र की बड़ी गहराई के साथ कैमरों का चयन करने की आवश्यकता है। इस प्रकार का कैमरा जड़त्वीय रिंग के पूर्ण आकार और आकार की जानकारी को कैप्चर कर सकता है, यह सुनिश्चित करते हुए कि रोबोट लोभी प्रक्रिया के दौरान लक्ष्य की स्थिति को सही ढंग से पा सकता है। इसी समय, क्षेत्र की बड़ी गहराई की विशेषता कैमरे को अलग -अलग दूरी पर स्पष्ट इमेजिंग प्रभाव बनाए रखने में सक्षम बनाती है, जिससे खिला की सटीकता में सुधार होता है।

इमेजिंग एल्गोरिदम और कैमरा चयन के अलावा, 3 डी विजन तकनीक को भी रोबोट नियंत्रण प्रणालियों के साथ बारीकी से एकीकृत करने की आवश्यकता है। रोबोट नियंत्रण प्रणाली में जड़ता की अंगूठी की वास्तविक समय तीन-आयामी स्थानिक जानकारी प्रसारित करके, रोबोट जड़ता की अंगूठी की स्थिति का सही पता लगा सकता है और लोभी कर सकता है। यह वास्तविक समय की सूचना विनिमय रोबोट को विभिन्न विशिष्टताओं के जड़ता के छल्ले का सामना करते समय अपनी लोभी रणनीतियों को जल्दी से समायोजित करने में सक्षम बनाता है, लचीला उत्पादन प्राप्त करता है।
3 डी विज़न टेक्नोलॉजी ने जड़त्वीय रिंगों की सटीक खिला प्रक्रिया में एक महत्वपूर्ण भूमिका निभाई है। इमेजिंग एल्गोरिदम का अनुकूलन करके, उपयुक्त कैमरों का चयन करके, और रोबोट नियंत्रण प्रणालियों के साथ बारीकी से सहयोग करते हुए, यह तकनीक जड़त्वीय रिंगों के कुशल और सटीक लोभी को प्राप्त करती है, उत्पादन दक्षता में सुधार करती है, और उत्पादन लागत को कम करती है।
नंबर 22, हांगयुआन रोड, गुआंगज़ौ, गुआंगडोंग प्रांत, चीन
