











क्यू आर संहिता

हमारे बारे में
उत्पादों
संपर्क करें

फ़ोन


पता
नंबर 22, हांगयुआन रोड, गुआंगज़ौ, गुआंगडोंग प्रांत, चीन

प्रोजेक्ट बैकग्राउंड:
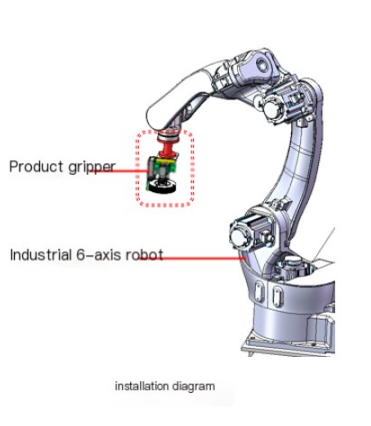
औद्योगिक स्वचालन के तेजी से विकास के साथ, अधिक से अधिक उद्यम बुद्धिमान रोबोट प्रौद्योगिकी की शुरूआत के माध्यम से अपनी उत्पादन लाइनों को अपग्रेड करने की कोशिश कर रहे हैं। उनमें से, डिब्रेइंग प्रक्रिया के लिए, फूवेई इंटेलिजेंट गोलाकार गति को करने के लिए रोबोट का मार्गदर्शन करने के लिए 2 डी विज़न का उपयोग करता है, जो न केवल उत्पादन दक्षता में सुधार कर सकता है, बल्कि श्रम लागत को कम कर सकता है और उत्पाद की गुणवत्ता में सुधार भी कर सकता है। इस समाधान का उद्देश्य एक उच्च स्वचालित डिब्रेनिंग प्रक्रिया बुद्धिमान उत्पादन लाइन बनाना है।

परियोजना कठिनाई:
विभिन्न वर्कपीस में आकार, बनावट, प्रकाश की स्थिति आदि में अंतर हो सकता है, जिसमें उच्च दृश्य स्थिति सटीकता की आवश्यकता होती है;
रोबोट को डिब्रेनिंग कार्यों को पूरा करने के लिए परिपत्र गति प्रक्षेपवक्रों को निष्पादित करने की आवश्यकता होती है, जिसके लिए रोबोट नियंत्रण प्रणाली की आवश्यकता होती है ताकि वास्तविक समय में गति प्रक्षेपवक्र की गणना और समायोजित करने में सक्षम हो;
डिब्यूरिंग की गुणवत्ता सीधे उत्पाद की गुणवत्ता और उत्पादन लाइन दक्षता को प्रभावित करती है। एक कुशल और स्थिर बहस की प्रक्रिया को कैसे प्राप्त करें, वर्कपीस को नुकसान से बचने या अवशिष्ट बूर छोड़ने से बचें, यह महत्वपूर्ण मुद्दा है जिसे परियोजना में संबोधित करने की आवश्यकता है।
समाधान:
1। कैमरा क्षेत्र में उत्पाद की स्थिति और रोबोट में उत्पाद की स्थिति के बीच परिवर्तन संबंध को "हाथ की आंख अंशांकन" के माध्यम से समन्वय प्रणाली के बीच पूरा करें;
2। दृश्य मार्गदर्शन या रोबोट शिक्षण बिंदुओं का उपयोग करके, कैमरा वस्तु की विभिन्न सतहों पर छवियों को कैप्चर कर सकता है;
3। विभिन्न कोणों से शूटिंग के कारण होने वाली छवि परिवर्तनों को प्राप्त करने के लिए छवि विरूपण सुधार एल्गोरिदम का उपयोग करना;
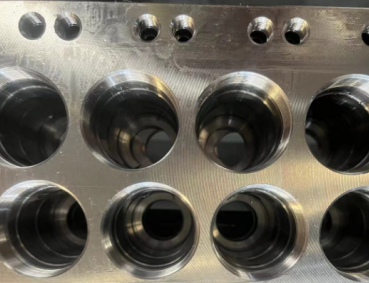
4। 2 डी कैमरा उत्पाद छेद पदों की मान्यता;
5। छेद की स्थिति के आधार पर चार समन्वय बिंदु उत्पन्न करें;
6। रोबोट को चार समन्वय बिंदु प्राप्त होते हैं;
7 रोबोट परिपत्र होल मंडराने वाले को पूरा करने के लिए "परिपत्र गति" कमांड के माध्यम से अनुक्रम में चार बिंदुओं को जोड़ता है;
बुनियादी मूल्य:
यह समाधान एक 2 डी विज़न सिस्टम, उच्च-सटीक रोबोट, डिब्रेनिंग टूल्स और इंटेलिजेंट कंट्रोल सिस्टम को सटीक मान्यता, पोजिशनिंग और वर्कपीस के स्वचालित डिब्रेनिंग को प्राप्त करने के लिए एकीकृत करता है। रोबोट स्वचालित रूप से योजना बना रहा है और एक वर्कपीस की स्थिति और आसन की जानकारी के आधार पर एक गोलाकार गति प्रक्षेपवक्र को निष्पादित करता है, जो कि 2 डी विज़न सिस्टम द्वारा प्रदान की जाने वाली वर्कपीस की जानकारी को पूरा करता है।
2 डी विज़न सिस्टम, रोबोट सिस्टम और इंटेलिजेंट कंट्रोल सिस्टम को एकीकृत करके डेब्रेइंग प्रक्रिया का स्वचालन उन्नयन प्राप्त किया गया है। यह समाधान न केवल उत्पादन दक्षता में सुधार करता है और श्रम लागत को कम करता है, बल्कि उत्पाद की गुणवत्ता और उत्पादन लाइन सुरक्षा को भी बढ़ाता है।
नंबर 22, हांगयुआन रोड, गुआंगज़ौ, गुआंगडोंग प्रांत, चीन
