











क्यू आर संहिता

हमारे बारे में
उत्पादों
संपर्क करें

फ़ोन


पता
नंबर 22, हांगयुआन रोड, गुआंगज़ौ, गुआंगडोंग प्रांत, चीन

एक उच्च एकीकृत और बुद्धिमान उपकरण के रूप में, समग्र रोबोट में चुंबकीय स्टील उत्पादन के क्षेत्र में आवेदन के लिए व्यापक संभावनाएं भी हैं। वर्तमान में, कई चुंबकीय स्टील उत्पादन उद्यम अभी भी पारंपरिक मैनुअल लोडिंग और अनलोडिंग विधियों का उपयोग करते हैं, जो न केवल अक्षम हैं, बल्कि मानव कारकों के लिए भी अतिसंवेदनशील हैं, जो अस्थिर उत्पाद की गुणवत्ता के लिए अग्रणी हैं। इसी समय, बाजार प्रतिस्पर्धा के गहनता के साथ, उद्यमों में उत्पादन दक्षता और गुणवत्ता के लिए तेजी से उच्च आवश्यकताएं हैं, और पारंपरिक उत्पादन विधियां अब बाजार की मांग को पूरा करने में सक्षम नहीं हैं। ग्राहक एक बुद्धिमान विनिर्माण उद्योग है और चुंबकीय स्टील लोडिंग और अनलोडिंग के लिए फूवेई खुफिया के माध्यम से पुराने रोबोटों को समग्र रोबोट में बदलने की उम्मीद करता है।
पारंपरिक चुंबकीय स्टील लोडिंग और अनलोडिंग के दर्द बिंदु:
मैनुअल ऑपरेशन पर 1 उच्च निर्भरता: पारंपरिक कटिंग प्रक्रियाएं अक्सर मैनुअल संचालन पर बहुत अधिक निर्भर करती हैं, जिसमें चुंबकीय स्टील के हैंडलिंग, पोजिशनिंग और प्लेसमेंट शामिल हैं। यह न केवल श्रम लागत को बढ़ाता है, बल्कि मानव कारकों के लिए भी अतिसंवेदनशील है, जिससे अस्थिर परिचालन सटीकता और दक्षता होती है।
2 परिचालन सुरक्षा मुद्दे: चुंबकीय स्टील में मजबूत चुंबकत्व होता है, और यदि गलती से मैन्युअल रूप से संचालित होता है, तो यह सुरक्षा दुर्घटनाओं जैसे कि हाथ की पकड़ और प्रभाव का कारण हो सकता है, ऑपरेटरों की सुरक्षा के लिए खतरा पैदा करता है।
3 कम उत्पादन दक्षता: मैनुअल ऑपरेशन पर निर्भरता के कारण, लोडिंग और अनलोडिंग की गति और दक्षता सीमित है, जिससे बड़े पैमाने पर और उच्च दक्षता वाले उत्पादन की जरूरतों को पूरा करना मुश्किल हो जाता है।
4। अस्थिर गुणवत्ता नियंत्रण: मैनुअल ऑपरेशन से गलत स्थिति और चुंबकीय स्टील की असमान प्लेसमेंट हो सकता है, जिससे बाद के प्रसंस्करण या असेंबली की गुणवत्ता को प्रभावित किया जा सकता है।
5। काम के माहौल के मुद्दे: चुंबकीय स्टील की लोडिंग और अनलोडिंग प्रक्रिया के दौरान, धूल और शोर जैसे पर्यावरण प्रदूषण उत्पन्न हो सकता है, जो काम के माहौल और ऑपरेटरों के स्वास्थ्य पर एक निश्चित प्रभाव डाल सकता है
ग्राहक की आवश्यकताएं:
समग्र रोबोट दो प्रकार के उत्पादों के लोडिंग और अनलोडिंग को पूरा करते हैं
लय की आवश्यकता: लगभग 80 सेकंड में उत्पादों के दो ढेर के लोडिंग को पूरा करें
सटीकता: जैसा कि चित्र में दिखाया गया है (मार्गदर्शन के साथ)
उत्पाद आकार 310 * 210 * 10 (चुंबकीय स्टील को छोड़कर)
नवीकरण योजना 1 समग्र रोबोट
मोटर को बदलें:
उच्च-प्रदर्शन मोटर्स का चयन करें जो यह सुनिश्चित करने के लिए रोबोट की संरचना से मेल खाते हैं कि आउटपुट टॉर्क और स्पीड लोभी और चुंबकीय स्टील को आगे बढ़ाने के लिए आवश्यकताओं को पूरा करते हैं।
मोटर में लंबे समय तक, उच्च-तीव्रता वाले कामकाजी वातावरण के अनुकूल होने के लिए उच्च विश्वसनीयता और स्थायित्व होना चाहिए।
सर्वो कंट्रोलर को बदलें:
मोटर गति के सटीक नियंत्रण को प्राप्त करने के लिए उच्च परिशुद्धता नियंत्रण एल्गोरिदम के साथ सर्वो नियंत्रकों का चयन करें।
सर्वो नियंत्रक को जटिल क्रियाओं को करने के दौरान रोबोट की सटीकता और स्थिरता सुनिश्चित करने के लिए तेजी से प्रतिक्रिया और स्थिर प्रदर्शन होना चाहिए।
रडार नेविगेशन:
स्वायत्त नेविगेशन और रोबोट की स्थिति को प्राप्त करने के लिए उच्च-सटीक रडार सेंसर से लैस।
रडार के साथ आसपास के वातावरण को स्कैन करके, एक पर्यावरणीय मानचित्र का निर्माण पथ योजना और बाधा परिहार कार्यों को प्राप्त करने के लिए किया जाता है।
लाइट बेल्ट:
अपनी दृश्यता और मान्यता में सुधार करने के लिए रोबोट के प्रमुख भागों में एलईडी लाइट स्ट्रिप्स स्थापित करें।
प्रकाश पट्टी में विभिन्न प्रकाश परिस्थितियों में काम के माहौल की प्रभावी रोशनी सुनिश्चित करने के लिए पर्याप्त चमक और एकरूपता होनी चाहिए।
वक्ता:
आपातकालीन स्थितियों में अलार्म बजने के लिए एक अलार्म हॉर्न स्थापित करें।
इस बीच, वक्ताओं का उपयोग वॉयस प्रॉम्प्ट के लिए किया जा सकता है, ऑपरेटरों और रोबोटों के बीच बातचीत की सुविधा प्रदान की जा सकती है।
ग्रिपर (कैमरा और अन्य सेंसर के साथ):
चुंबकीय स्टील के स्थिर और सटीक मनोरंजक सुनिश्चित करने के लिए डिजाइन अनुकूलित विशेष ग्रिपर्स।
चुंबकीय स्टील की सटीक मान्यता और मनोरंजक बल के नियंत्रण को प्राप्त करने के लिए ग्रिपर पर उच्च-परिभाषा कैमरों और बल संवेदन, स्पर्श और अन्य सेंसर को एकीकृत करना।
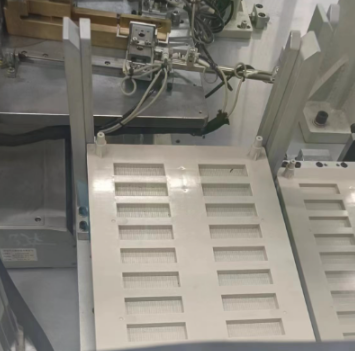
2 、 लोडिंग क्षेत्र
पोजिशनिंग गाइड ग्रूव:
डिज़ाइन पोजिशनिंग गाइड स्लॉट्स मैग्नेटिक स्टील को निर्दिष्ट पदों पर मार्गदर्शन करने के लिए, रोबोट लोभी को सुविधाजनक बनाते हुए।
गाइड ग्रूव में पर्याप्त सटीकता और स्थिरता होनी चाहिए ताकि यह सुनिश्चित किया जा सके कि चुंबकीय स्टील को पूर्व निर्धारित स्थिति में सटीक रूप से रखा जा सकता है।
डेस्कटॉप पोजिशनिंग मार्क:
रोबोट मान्यता और ग्रिपिंग पॉइंट्स की स्थिति के लिए लोडिंग एरिया डेस्कटॉप पर स्पष्ट पोजिशनिंग मार्क मार्क्स सेट करें।
मार्क मार्क में स्पष्ट और आसानी से पहचानने योग्य विशेषताएं होनी चाहिए ताकि यह सुनिश्चित किया जा सके कि रोबोट इसे अलग -अलग प्रकाश परिस्थितियों में सटीक रूप से पहचान सकता है।
3 、 सामग्री अनलोडिंग क्षेत्र
उपकरण पोजिशनिंग मार्क:
रोबोट मान्यता और प्लेसमेंट पॉइंट्स की स्थिति के लिए अनलोडिंग क्षेत्र में उपकरण पर पोजिशनिंग मार्क मार्कर सेट करें।
मार्क मार्क के डिजाइन को यह सुनिश्चित करने के लिए उपकरणों की संरचना और आकार को ध्यान में रखना चाहिए कि रोबोट चुंबकीय स्टील को निर्दिष्ट स्थिति में सटीक रूप से रख सकता है।
इलेक्ट्रिक कंट्रोल पैनल डोर:
रोबोट और ऑपरेटरों को आकस्मिक चोटों से बचाने के लिए अनलोडिंग क्षेत्र में इलेक्ट्रिक कंट्रोल पैनल दरवाजे स्थापित करें।
सुरक्षात्मक पैनल के दरवाजे में त्वरित प्रतिक्रिया और स्वचालित समापन कार्यों को यह सुनिश्चित करने के लिए होना चाहिए कि यह स्वचालित रूप से बंद हो सकता है जब रोबोट काम कर रहा है, कर्मियों को खतरनाक क्षेत्र में प्रवेश करने से रोकता है।
इलेक्ट्रिक कंट्रोल पुश-पुल स्लॉट:
अनलोडिंग क्षेत्र से बाहर चुंबकीय स्टील के साथ उपकरण या ट्रे को धक्का देने के लिए एक विद्युत नियंत्रित स्लाइडिंग नाली डिजाइन करें।
स्लाइडिंग ग्रूव में यह सुनिश्चित करने के लिए चिकनी और विश्वसनीय गति प्रदर्शन होना चाहिए कि धक्का देने की प्रक्रिया के दौरान चुंबकीय स्टील या उपकरण क्षतिग्रस्त नहीं होंगे।
उपरोक्त परिवर्तन योजना के माध्यम से, समग्र रोबोट स्वचालित लोडिंग और चुंबकीय स्टील को उतारने में सक्षम होगा, उत्पादन दक्षता और गुणवत्ता स्थिरता में सुधार करेगा। इस बीच, लोडिंग और अनलोडिंग क्षेत्रों के लेआउट और उपकरण कॉन्फ़िगरेशन को अनुकूलित करके, रोबोट कार्यों के सटीक और कुशल पूरा होने को सुनिश्चित कर सकता है।
नंबर 22, हांगयुआन रोड, गुआंगज़ौ, गुआंगडोंग प्रांत, चीन
