










क्यू आर संहिता

हमारे बारे में
उत्पादों
संपर्क करें

फ़ोन


पता
नंबर 22, हांगयुआन रोड, गुआंगज़ौ, गुआंगडोंग प्रांत, चीन

1 、 परियोजना अवलोकन
इस योजना का उद्देश्य मशीन दृष्टि और बल नियंत्रण में एक विश्वविद्यालय प्रयोगशाला की शिक्षण आवश्यकताओं को पूरा करने के लिए एक रोबोट शिक्षा अभ्यास मंच प्रणाली को अनुकूलित करना है। सिस्टम को ऑबो-I5 सहयोगी रोबोट, हिकविज़न इंडस्ट्रियल कैमरा, 3 डी कैमरा, और छह एक्सिस फोर्स सेंसर के आसपास रोबोट नियंत्रण, दृश्य निरीक्षण और बल नियंत्रण विधानसभा जैसे कार्यों को प्राप्त करने और बाद के कार्यात्मक विस्तार के लिए ओपन-सोर्स ऊपरी कंप्यूटर सॉफ्टवेयर प्रदान करने के लिए विकसित किया जाएगा।

2 、 सिस्टम हार्डवेयर रचना
रोबोट: ऑबो-I5 सहयोगी रोबोट को अपनाते हुए, इसमें उच्च परिशुद्धता और उच्च सुरक्षा की विशेषताएं हैं, और शिक्षण परिदृश्यों के लिए उपयुक्त है।
कैमरा: हिकविज़न इंडस्ट्रियल कैमरा और 3 डी कैमरा सहित, वर्कपीस की छवि जानकारी प्राप्त करने के लिए उपयोग किया जाता है, पारंपरिक छवि प्रसंस्करण और गहरी सीखने की छवि का पता लगाने का समर्थन करता है।
छह आयामी बल सेंसर: कुनवेई (KWR75) या अन्य ब्रांडों को रोबोट एंड इफ़ेक्टर और वर्कपीस के बीच बल इंटरैक्शन जानकारी की वास्तविक समय की निगरानी के लिए चुना जाता है।
3 、 ऊपरी कंप्यूटर सॉफ्टवेयर डिजाइन
बुनियादी कार्यों:
रोबोट नियंत्रण: रोबोट के कनेक्शन, वियोग, संयुक्त या आसन नियंत्रण जैसे कार्यों को लागू करें।
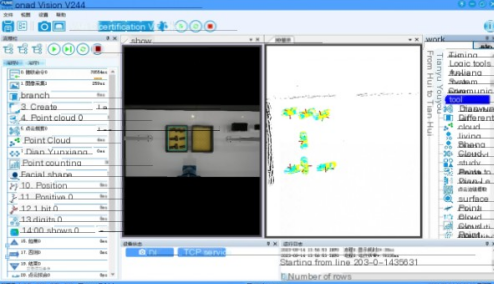
कैमरा नियंत्रण: कैमरा कनेक्शन, वियोग और छवि अधिग्रहण जैसे कार्यों को लागू करें।
स्थिति प्रदर्शन: रोबोट के संयुक्त और मुद्रा की वास्तविक समय प्रदर्शन, स्थिति, छह अक्ष बल सेंसर की स्थिति पैरामीटर, और कैमरे द्वारा कैप्चर की गई छवियां।
अनन्य विशेषताएं:
शाफ्ट होल असेंबली: ऊपरी कंप्यूटर के संचालन के माध्यम से, दृश्य निरीक्षण और बल नियंत्रण प्रौद्योगिकी के साथ संयुक्त, शाफ्ट छेद का स्वचालित विधानसभा कार्य प्राप्त किया जाता है।
इंटरफ़ेस डिज़ाइन: ऊपरी कंप्यूटर इंटरफ़ेस संक्षिप्त, स्पष्ट और संचालित करने में आसान होना चाहिए। इंटरफ़ेस में बुनियादी फ़ंक्शन बटन और एक स्थिति प्रदर्शन क्षेत्र शामिल होना चाहिए, साथ ही शाफ्ट होल असेंबली फ़ंक्शन तक पहुंच प्रदान करना चाहिए।
4 、 कार्य कार्यान्वयन
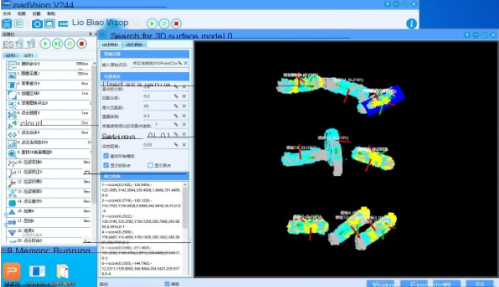
मशीन विजन:
पारंपरिक छवि का पता लगाना: टेम्पलेट मिलान, सर्कल फिटिंग, एज फिटिंग और वर्कपीस का पता लगाने और पहचानने के लिए अन्य तरीकों का उपयोग करना, बारकोड, क्यूआर कोड, चरित्र संख्याओं की मान्यता का समर्थन करता है, साथ ही साथ ग्रेस्केल क्षेत्र और प्लेट मात्रा की गणना।
डीप लर्निंग इमेज डिटेक्शन: डीप लर्निंग एल्गोरिदम के माध्यम से वर्कपीस की स्वचालित मान्यता और स्थानीयकरण। यद्यपि डीप लर्निंग को अभी भी छवियों के मैनुअल एनोटेशन की आवश्यकता है, हम प्रशिक्षण दक्षता और मान्यता सटीकता में सुधार करने का प्रयास करेंगे, धीरे -धीरे एनोटेशन वर्कलोड को कम करेंगे।
पावर कंट्रोल असेंबली:
छह आयामी बल सेंसर से डेटा का संयोजन, रोबोट अंत प्रभावकार और वर्कपीस के बीच बल बातचीत नियंत्रण प्राप्त करता है, और शाफ्ट होल के पूर्ण सटीक विधानसभा को पूरा करता है।
5 、 परियोजना जोखिम और प्रतिक्रिया उपाय
छह अक्ष बल सेंसर के साथ सहयोग का जोखिम: छह अक्ष बल सेंसर के साथ सहयोग की कमी के कारण, कुछ तकनीकी कठिनाइयों और अनिश्चितताएं हो सकती हैं। हम समस्या से निपटने और सेंसर के सुचारू एकीकरण और स्थिर संचालन को सुनिश्चित करने के लिए एक पेशेवर तकनीकी टीम की व्यवस्था करेंगे।
डीप लर्निंग इमेज डिटेक्शन का जोखिम: डीप लर्निंग इमेज डिटेक्शन के लिए एक क्लिक ट्रेनिंग की आवश्यकता को पूरा करते हुए, एक निश्चित स्तर की मान्यता सटीकता और दक्षता की आवश्यकता होती है। हम एक क्लिक प्रशिक्षण को लागू करने के तरीकों की खोज करते हुए, मान्यता सटीकता और दक्षता में सुधार करने के लिए गहरे शिक्षण एल्गोरिदम का अनुकूलन करना जारी रखेंगे।
6 、 पोस्ट विस्तार और दृश्य स्विचिंग
ऊपरी कंप्यूटर सॉफ्टवेयर ओपन सोर्स डिज़ाइन को अपनाता है, जो बाद के शिक्षण में आवश्यकतानुसार कार्यात्मक विस्तार और दृश्य स्विचिंग की सुविधा देता है। उदाहरण के लिए, शाफ्ट होल के विधानसभा दृश्य को ठीक गियर की मेशिंग या मान्यता और अन्य वर्कपीस के लोभी जैसे कार्यों में स्विच किया जा सकता है। ओपन-सोर्स कार्यक्रमों को संशोधित और डीबग करके, विभिन्न परिदृश्यों में रोबोट ऑपरेशन और विजुअल डिटेक्शन फ़ंक्शन प्राप्त करना आसान है।
यह योजना रोबोट शिक्षा अभ्यास प्लेटफॉर्म के लिए एक सुविधा समृद्ध और आसानी से विस्तार योग्य शिक्षण वातावरण प्रदान करने के लिए, ओपन-सोर्स ऊपरी कंप्यूटर सॉफ्टवेयर डिज़ाइन के साथ संयुक्त, रोबोट, कैमरा और छह एक्सिस बल सेंसर जैसे हार्डवेयर संसाधनों को एकीकृत करती है। व्यावहारिक प्लेटफार्मों के उपयोग के माध्यम से, छात्र मशीन दृष्टि और बल नियंत्रण प्रौद्योगिकी के सिद्धांतों और अनुप्रयोगों की गहरी समझ हासिल कर सकते हैं, और उनकी व्यावहारिक और अभिनव क्षमताओं में सुधार कर सकते हैं।
नंबर 22, हांगयुआन रोड, गुआंगज़ौ, गुआंगडोंग प्रांत, चीन
