




")






क्यू आर संहिता

हमारे बारे में
उत्पादों
संपर्क करें

फ़ोन


पता
नंबर 22, हांगयुआन रोड, गुआंगज़ौ, गुआंगडोंग प्रांत, चीन

परियोजना अवलोकन
इस परियोजना का उद्देश्य Shanxi क्षेत्र में इनडोर उत्पादन स्थितियों के तहत ग्राहकों की चार्जिंग जरूरतों को पूरा करने के लिए एक कुशल और स्थिर डंप ट्रक स्वचालित चार्जिंग सिस्टम डिजाइन करना है। सिस्टम को असमान संचालन और इंजीनियरिंग वाहनों के नियंत्रण को प्राप्त करने की आवश्यकता है, केवल उत्पादन लाइन के निरंतर संचालन आवश्यकताओं को पूरा करने के लिए अंकों ए और बी के हैंडलिंग और स्वचालित चार्जिंग कार्यों को पूरा करना।
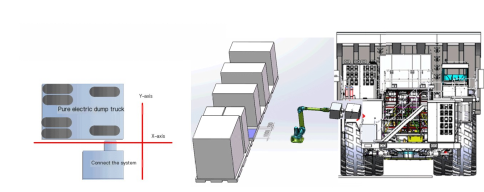
तंत्र संरचना
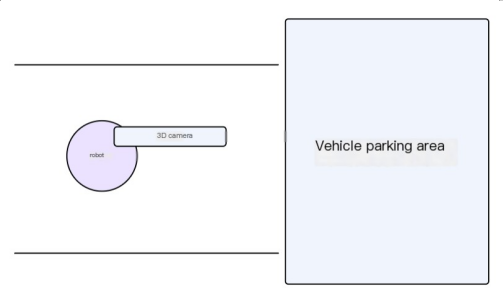
विजुअल पोजिशनिंग सिस्टम: डंप ट्रकों पर चार्जिंग पोर्ट की सटीक स्थिति प्राप्त करने के लिए उच्च-सटीक कैमरों और दृश्य एल्गोरिदम का उपयोग करना। दृश्य प्रणाली को विभिन्न इनडोर वातावरणों में स्थिर संचालन सुनिश्चित करने के लिए धूल और प्रत्यक्ष सूर्य के प्रकाश का विरोध करने की क्षमता की आवश्यकता होती है।
रोबोट और गन पुशिंग मैकेनिज्म: 3 मी या उससे अधिक के हाथ की अवधि के साथ औद्योगिक रोबोट चुने जाते हैं, विशेष रूप से डिज़ाइन किए गए बंदूक धक्का तंत्र से सुसज्जित हैं। बंदूक धक्का देने वाले तंत्र में यह सुनिश्चित करने के लिए पर्याप्त जोर और सटीकता होनी चाहिए कि चार्जिंग गन को सटीक रूप से और जल्दी से चार्जिंग पोर्ट में डाला जा सकता है।
चार्जिंग सिस्टम: 3 मेगावाट के उच्च-शक्ति चार्जिंग उपकरण से लैस, यह सुनिश्चित करते हुए कि डंप ट्रक को थोड़े समय में पूरी तरह से चार्ज किया जा सकता है और उत्पादन दक्षता में सुधार हो सकता है।
नियंत्रण प्रणाली: एक एकीकृत नियंत्रण प्रणाली के माध्यम से, दृश्य स्थिति, रोबोट गति और चार्जिंग प्रक्रिया का सटीक नियंत्रण प्राप्त किया जा सकता है। नियंत्रण प्रणाली में उच्च स्वचालन और खुफिया विशेषताएं होनी चाहिए, और मानव रहित स्वचालित चार्जिंग प्राप्त करने में सक्षम हो।
कार्यप्रवाह
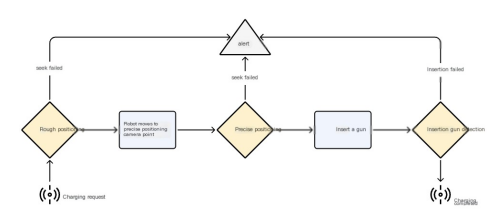
सेल्फ डंपिंग ट्रक पोजिशनिंग: विज़ुअल पोजिशनिंग सिस्टम के माध्यम से डंप ट्रक के चार्जिंग पोर्ट स्थिति को पहचानें और पता लगाएं।
रोबोट मोशन: कंट्रोल सिस्टम विजुअल पोजिशनिंग परिणामों के आधार पर डंप ट्रक के चार्जिंग पोर्ट के पास जाने के लिए रोबोट का मार्गदर्शन करता है।
धक्का बंदूक सम्मिलन: रोबोट एक धक्का बंदूक तंत्र से सुसज्जित है, जो सटीक रूप से और जल्दी से चार्जिंग गन को डंप ट्रक के चार्जिंग पोर्ट में सम्मिलित करता है।
चार्जिंग प्रक्रिया: चार्जिंग सिस्टम डंप ट्रक को तब तक चार्ज करना शुरू कर देता है जब तक कि वह प्रीसेट पावर लेवल या समय तक नहीं पहुंचता।
रोबोट निकासी: चार्जिंग पूरा होने के बाद, रोबोट चार्जिंग पोर्ट को खाली कर देगा और अगले डंप ट्रक के आगमन की प्रतीक्षा करेगा।
प्रमुख प्रौद्योगिकी
विजुअल पोजिशनिंग टेक्नोलॉजी: डीप लर्निंग जैसे एल्गोरिदम का उपयोग करके, विजुअल पोजिशनिंग सिस्टम की सटीकता और स्थिरता में सुधार किया जा सकता है।
रोबोट नियंत्रण प्रौद्योगिकी: चार्जिंग दक्षता में सुधार के लिए रोबोट मोशन प्रक्षेपवक्र और गति का अनुकूलन करें।
बंदूक पुशिंग मैकेनिज्म का डिज़ाइन: सुनिश्चित करें कि बंदूक पुशिंग मैकेनिज्म में इसकी संरचनात्मक कॉम्पैक्टनेस और विश्वसनीयता पर विचार करते हुए पर्याप्त जोर और सटीकता है।
जोखिम प्रतिक्रिया
इनडोर पर्यावरण संरक्षण: एक स्वच्छ और शुष्क इनडोर वातावरण सुनिश्चित करें, दृश्य स्थिति प्रणाली पर धूल और प्रत्यक्ष सूर्य के प्रकाश के प्रभाव को कम करें।
हार्डवेयर रखरखाव: नियमित रूप से अपने सामान्य संचालन को सुनिश्चित करने के लिए रोबोट और विजुअल पोजिशनिंग सिस्टम जैसे हार्डवेयर को बनाए रखें और रखरखाव करें।
व्यावसायिक मूल्यांकन: समाधान की सुरक्षा और व्यवहार्यता सुनिश्चित करने के लिए बंदूक धक्का देने वाले तंत्र, चार्जिंग सिस्टम आदि का मूल्यांकन और अनुकूलन करने के लिए पेशेवरों को आमंत्रित करें।
नंबर 22, हांगयुआन रोड, गुआंगज़ौ, गुआंगडोंग प्रांत, चीन
